


ヒューマノイドに関する研究は通常、物の操作や二足歩行に焦点を当てている。しかし、例えば災害対応などの特定の用途において、これらのロボットは空中移動能力も持つことで大きな利点を得られると考えている。この空中移動はヒューマノイドにとって未開拓の研究領域だ。そこで、空中ヒューマノイドロボティクスを次の能力を持つプラットフォームとして定義している。
- Advertisement -
- 空中移動:屋外の検査を行い、建物間を移動する
- 接触移動:屋内の検査を行い、階段を登る
- 物の操作:ドアを開け、物を動かし、バルブを閉じる
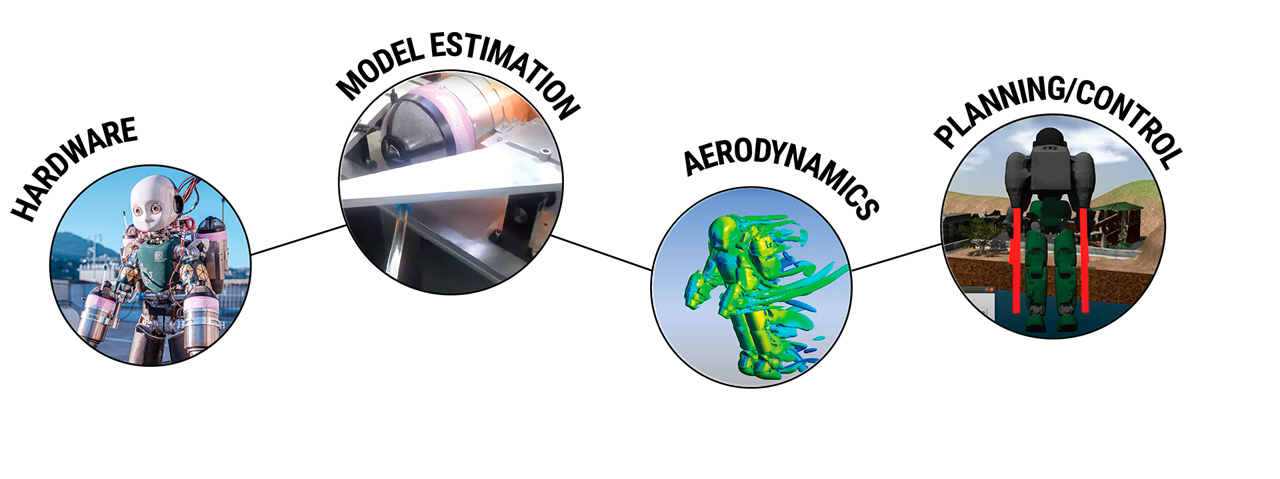
これらの能力をiCubヒューマノイドロボットに実装するため、複数の方向から研究活動を行っている。
機械設計
飛行型ヒューマノイドロボットであるiRonCubを用いて研究活動を進めている。効果的に飛行できるように、ヒューマノイドロボットの機械設計を改良する方法を研究している。
PTC Creoを使用してロボットのCADモデルを設計し、実験からのフィードバックに基づいて継続的に改良している。現在のバージョンはiRonCub-Mk3だ。CADモデルから、半自動的にURDF生成手順を使用して、最新の運動学と動力学情報を取得している。このURDFモデルは、計画、制御、推定、シミュレーションに使用している。
- Advertisement -
iRonCubのプロトタイプ
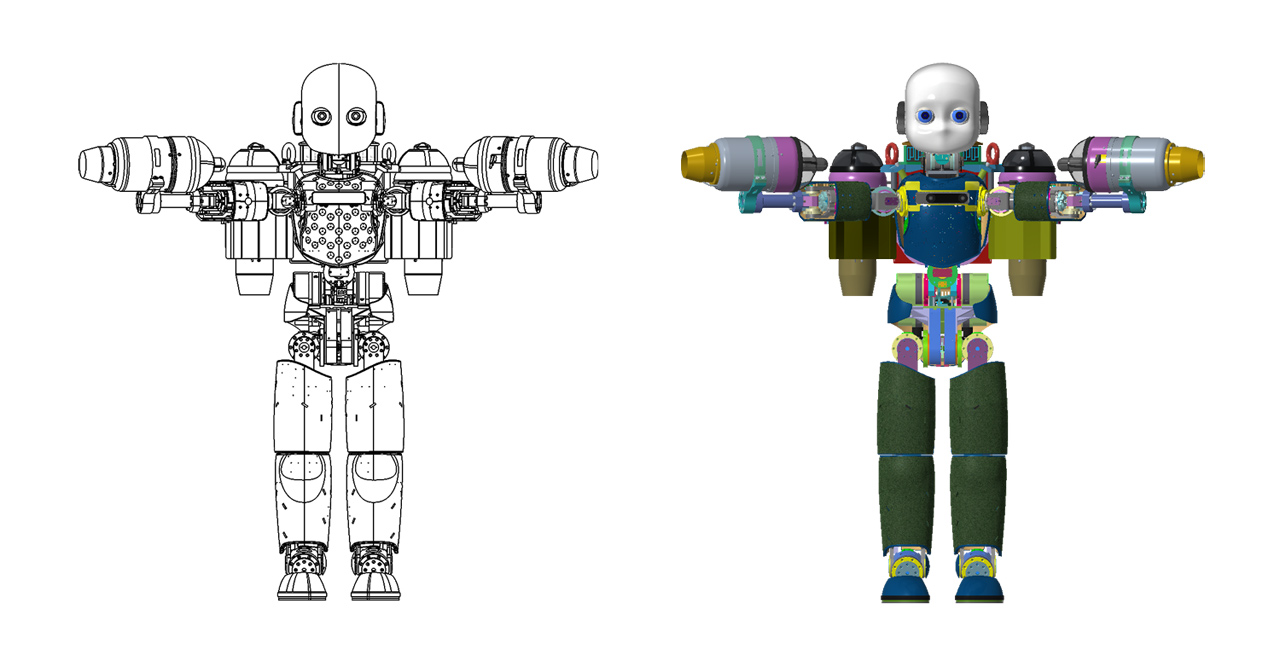
iRonCubには、iCub v2.5とv3.0を基にした2つのプロトタイプがある。どちらも4つのジェットエンジンを搭載しており、2つは腕に、他の2つはロボットの背中に取り付けられたジェットパックにある。現在はiRonCubバージョン3で実験を行っている。
外部エンジンをサポートするために、iCubのハードウェア設計に変更が加えられ、新しいチタン製の背骨や耐熱カバーが追加された。iRonCub3はジェットエンジンを含めて約70kgで、タービンは最大1000N以上の推力を提供し、排気温度は600度を超える。
計画と制御
起動プランナー
飛行と歩行の軌道計画、および歩行から飛行への移行を計画することが、空中ヒューマノイドロボティクスにおいて非常に重要な課題となっている。
この問題に対処するため、Pythonを使ったモーメントベースの軌道計画アルゴリズムを設計し、直接多重射法を使用して実装した。このプランナーはシミュレーションで検証され、実際のロボットでテストされる予定だ。
飛行制御
飛行中のロボットの姿勢と位置を制御するための制御アルゴリズムを設計している。制御設計は制約付きの二次計画最適化に基づいており、提案されたアルゴリズムの理論的な確かさは、リャプノフ解析を通じて確認されている。このフレームワークは、ジェットタービンの数に関係なく機能するように一般化されており、ロボットやジェットエンジンに関連する物理的制約も満たすように設計されている。
- Advertisement -
シミュレーションはC++とGazeboを使用して行い、C++のコントローラは実際のロボットの実験でもテストされている。
推定
ベースポーズ推定
飛行ロボットにとって、空間内での自己位置推定は非常に重要な役割を果たす。現在、C++でセンサーフュージョンアルゴリズムを開発しており、ロボットの位置と空間での向きを推定している。搭載されているIMUとロボットの胸に取り付けられたReal Senseを使用している。
ジェットエンジンと推力推定
実際のロボット実験で飛行制御と計画を効率的にテストするため、ジェットタービンのモデル化と識別に関する研究活動を進めている。このため、ジェットエンジンの入力と出力の関係を識別するための高度なテストベンチを開発した。推力の推定と制御は、識別されたタービンモデルと、回転数やポンプ電圧などのタービンから得られるフィードバックデータに基づいて実装されている。推力推定をさらに向上させるため、ロボットのセンサーやモデルを推定アルゴリズムに組み込むことも目指している。
空気力学
CFDシミュレーション
単一の剛体の空気力学は複雑であり、飛行するヒューマノイドロボットのような多体システムの空気力学を扱うと、空気力学的効果の閉じた解を直接的に提供するのが困難だ。このため、CFDモデルを使用して多体システムでの空気力学を理解するための数値シミュレーションを実行している。
風洞実験
iRonCubを実際に使用し、ミラノ工科大学の風洞で実験を行っている。この活動の目的は、CFDシミュレーションを検証し、有用なデータを収集することだ。ヒューマノイドロボットが風洞でテストされるのはこれが初めてとなる。











